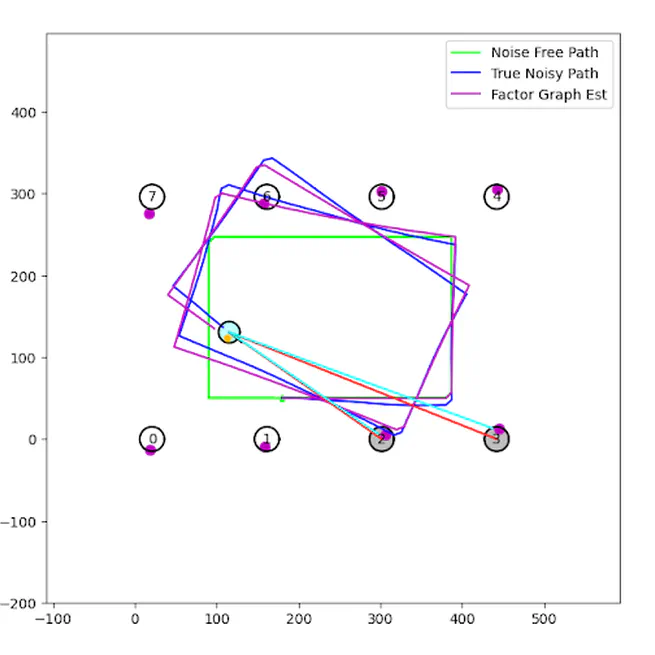
Factor graph-based offline SLAM method
December 2023
EKF-based SLAM algorithm with unknown data association
November 2023
Particle filter localization for a mobile robot within an occupancy grid map.
October 2023