Non-Uniform B-spline Trajectory Optimization using Control Point Representation Transformations
April 2025·,,,·
1 min read
David Christensen
Landon Shumway
Randal W. Beard
Timothy W. McLain
Abstract
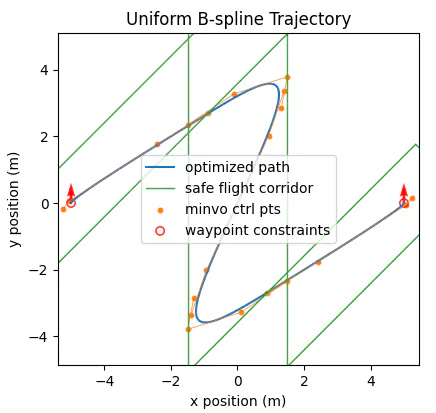
Online trajectory generation for unmanned aerial vehicles has attracted increased interest for a variety of autonomous applications. This paper explores the use of non-uniform B-splines to produce improved time-optimal trajectories in comparison to contemporary work that uses uniform B-splines. This paper introduces the non-uniform B-spline matrix form and the transformation of non-uniform B-spline control points to other parametric representations such as MINVO and B'ezier control points. Conversion between control point representations allows the optimization to take advantage of the piecewise continuity of B-splines, as well as the tighter convex bounding properties of MINVO and B'ezier curve representations. The results show that non-uniform B-spline trajectories significantly outperform uniform B-splines trajectories in time optimality and path length. However, computational performance is degraded when optimizing for non-uniform B-splines, thus requiring computational improvements for online use.
Type
Publication
American Control Conference
This paper has been accepted but not yet published at the time of writing.