The following demonstrate personal, academic, and research projects I have worked on over the years.
Adaptive finite time guidance law for pursuer tracking an accelerating target.
Cooperative control methods for the Weapon-Target Assignment (WTA) problem
Cooperative control methods for rendezvous and formation control that guarantee agent connectedness throughout the maneuver.
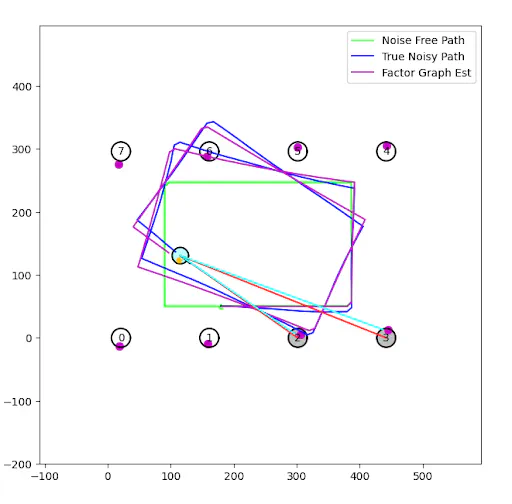
Factor graph-based offline SLAM method
EKF-based SLAM algorithm with unknown data association
Particle filter localization for a mobile robot within an occupancy grid map.
Table-top robot that accepts user input and mechanically deals playing cards accordingly
Estimation and control to land a drone autonomously on a small raft.